Russian Robots to Learn to See and Navigate Underwater Without GPS
Researchers at Sevastopolskiy Gosudarstvennyy Universitet are developing AI technologies for unmanned systems designed to operate in extreme conditions.
At the Laboratoriya Robototekhnika i Intellektualnye Sistemy Upravleniya (Robotics and Intelligent Control Systems Laboratory) at Sevastopolskiy Gosudarstvennyy Universitet (Sevastopol State University), engineers are developing computer vision and autonomous control algorithms for underwater and aerial robots.
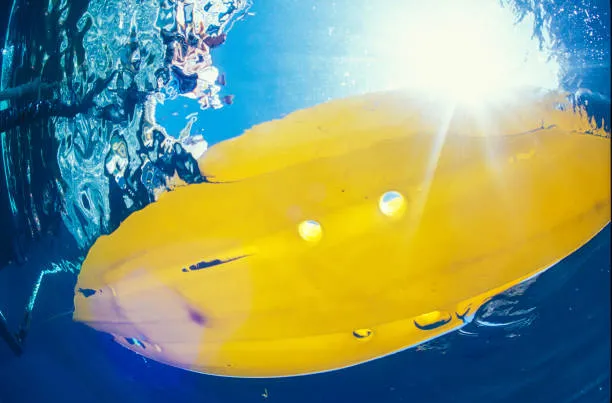
Underwater, visibility is often close to zero because of mud, silt, and suspended particles. Sunlight does not penetrate to depth, and satellite navigation signals are unavailable.
Engineers are building systems that allow robotic platforms to recognize objects, estimate distance, and respond in real time. As graduate researcher and junior scientist Aleksandr Lyashko explains, “the hardest part is not simply recognizing an object, but getting the underwater vehicle to respond to it.”
Swarm Intelligence
One of the key research areas focuses on swarm control of unmanned vehicles, where artificial intelligence acts as a decentralized decision-making “brain.” Each vehicle operates autonomously using neural networks. At the same time, the team is implementing reinforcement learning: algorithms are trained in simulators to hold a vehicle at a fixed point, and the trained models are then transferred to real-world controllers.
Finding the Way Without GPS
Another project centers on navigation without GPS. Neural networks analyze camera images and support a visual SLAM system in building a map of the surrounding space.
The research is backed at the highest levels, with grant funding allocated to support further development.